Fabrication of Micro/Nanoscale Motors

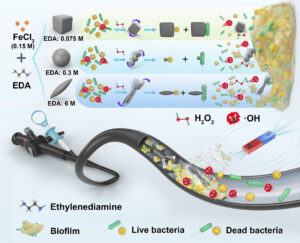
Biomedical device-associated infections are a primary cause of clinical treatment failure, with persistent biofilm infections in the intricate architectures of medical devices further compounding the issue. In this work, we developed magnetite microrobots (Fe3O4 MRs) with various geometries, including cubic, spherical, and fusiform shapes, which integrate magnetically driven mechano-bactericidal performance with peroxidase (POD)-like catalytic activity for the effective eradication of bacteria and biofilm-associated infections. Under exposure to a rotating magnetic field (RMF), these MRs demonstrated precise and controllable rolling actuation in a defined path. Notably, among the three MRs, the fusiform MRs exhibited superior penetration into the extracellular polymeric substances (EPS) matrix and POD-like catalytic bactericidal activity, owing to their elongated geometry and high content of Fe(II)-mediated Fenton-like reaction. Finite element simulation elucidated shape-dependent antibacterial mechanisms and magnetically driven locomotion, demonstrating that the fusiform geometry with sharp tips confers distinct advantages in rolling locomotion and mechanical sterilization. Moreover, the practical validation using endoscopes and biopsy forceps as medical device models confirmed that the magnetically driven fusiform MRs effectively removed biofilms and exerted synergistic bactericidal effects against deeply embedded bacteria on complex and hard-to-reach surfaces. Overall, the shape-dependent MRs offer a promising next-generation platform for disinfecting complex medical devices.
Fabrication of Micro/Nanoscale Motors